Research
Our research can be divided into several topic areas.
1. Theory of machine learning through the lens of symmetry including generalization and approximation error for equivariant neural networks, study of approximate and extrinsic symmetry in deep learning, symmetries of neural network parameters spaces and their effects on optimization, structure of equivariant neural networks.
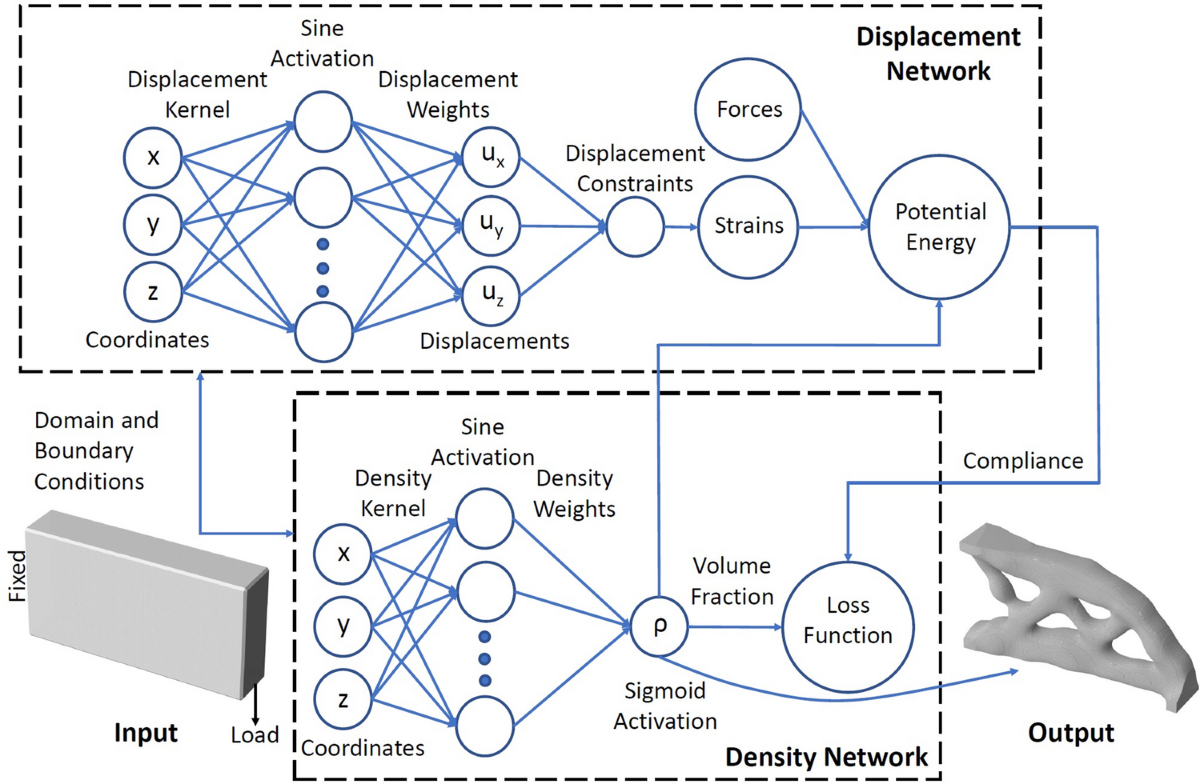
2. Design of equivariant neural networks for scientific and engineering applications including fluid dynamics, radar signal processing, astrophysical simulation, radar signal processing, and materials and thin films.
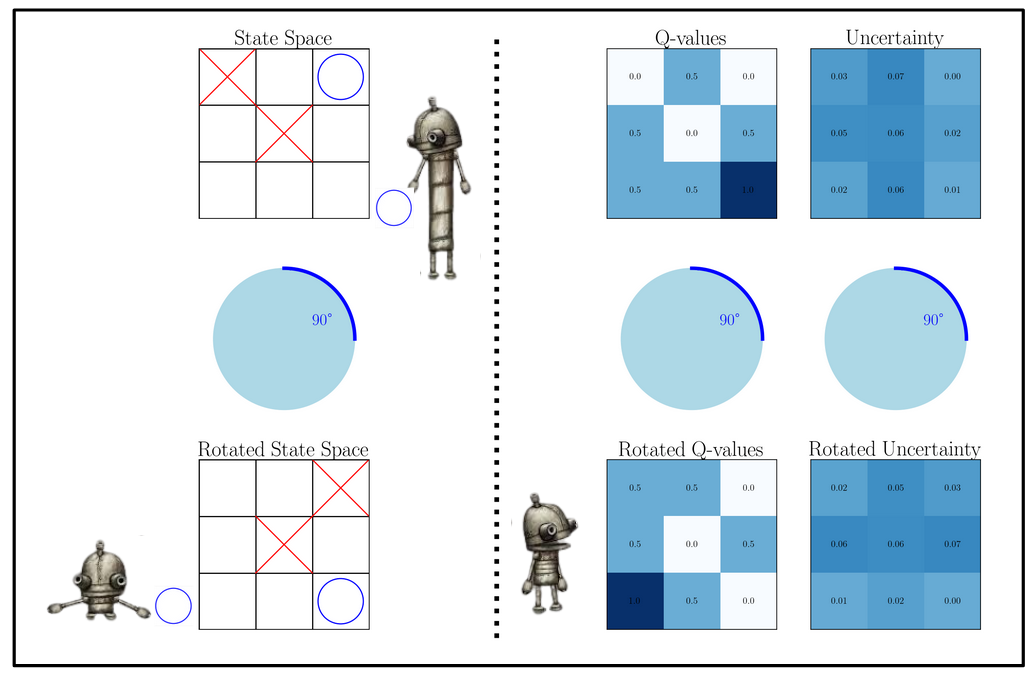
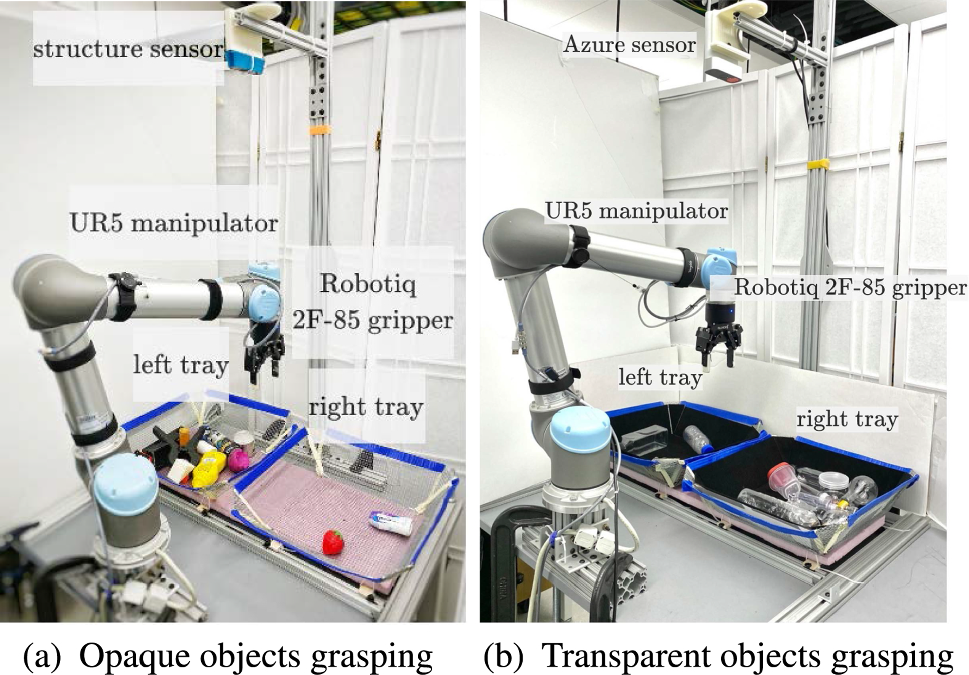
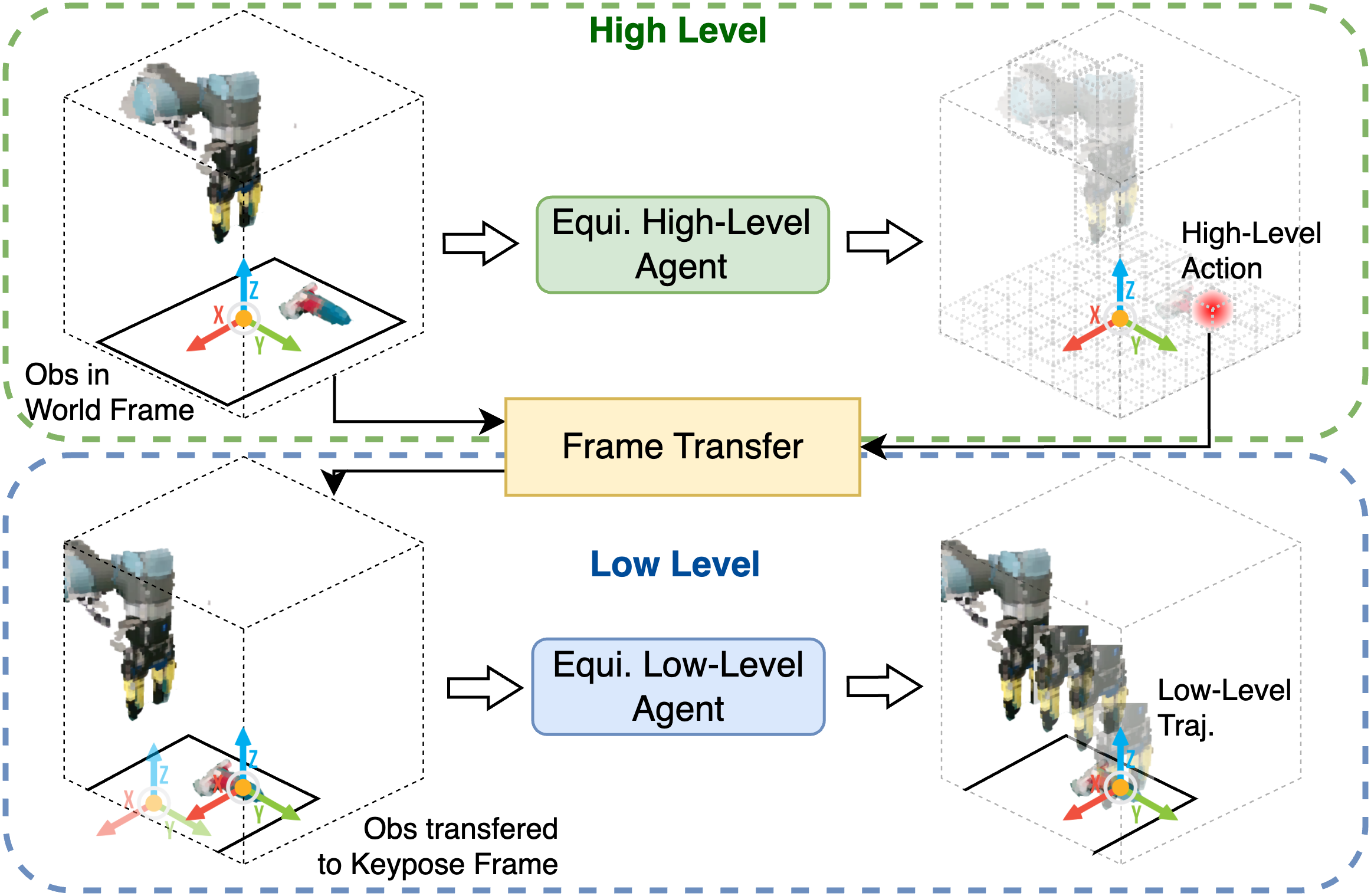
3. Equivariant methods for deep reinforcement learning with an emphasis on robotic learning and perception. Our goals are sample efficient algorithms for real world robot learning.
4. Design models that can utilize approximate and unknown symmetry. These include symmetry discovery methods, relaxed equivariant methods, applications of equivariant models in cases of extrinsic symmetry, and methods that can learn group actions in cases of latent symmetry.
Selected Publications
2026
-
ICML 2026
 Smoothness Errors in Dynamics Models and How to Avoid ThemThe International Conference on Machine Learning (ICML), 2026
Smoothness Errors in Dynamics Models and How to Avoid ThemThe International Conference on Machine Learning (ICML), 2026
2026

2026

2026

2026

2026

2026
2025
2025
2025
2025

2025

2025

2025
2025
2025

2024
2024

2024

2024
2024
2024
2024

2024

2024

2024

2024

2023

2023

2023

2023

2023

2022
-
ICML 2022
 Learning Symmetric Embedding Networks for Equivariant World ModelsWe propose learning symmetric embedding networks (SENs) for input spaces where we do not know the effects of symmetry transformations, to a feature space where the transformation is known. This network can be combined with downstream task-specific equivariant networks and trained end-to-end in latent space. SENs can extend the applicability of equivariant networks to a wider variety of domains.
Learning Symmetric Embedding Networks for Equivariant World ModelsWe propose learning symmetric embedding networks (SENs) for input spaces where we do not know the effects of symmetry transformations, to a feature space where the transformation is known. This network can be combined with downstream task-specific equivariant networks and trained end-to-end in latent space. SENs can extend the applicability of equivariant networks to a wider variety of domains.
2022
-
PMLR Vol. 197
 Image to Icosahedral Projection for SO(3) Object Reasoning from Single-View ImagesWe develop a hybrid equivariant model that incorporates SO(2) and SO(3) equivariant convolution layers to improve 3D reasoning from 2D images. Our method outperforms baselines on shape classification and pose prediction tasks, especially in the low-data regime.
Image to Icosahedral Projection for SO(3) Object Reasoning from Single-View ImagesWe develop a hybrid equivariant model that incorporates SO(2) and SO(3) equivariant convolution layers to improve 3D reasoning from 2D images. Our method outperforms baselines on shape classification and pose prediction tasks, especially in the low-data regime.
2022
-
RLDM 2022
 Understanding the Mechanism behind Data Augmentation's Success on Image-based RLData augmentation is known to provide substantial benefits for image-based reinforcement learning (RL) but the mechanism is not clear. We show that data augmentation increases both the equivariance and invariance of the convolutional encoder, e.g. the feature map is spatially smooth. We show that a simple Gaussian blur operation can achieve the same effect for some of the tested environments.
Understanding the Mechanism behind Data Augmentation's Success on Image-based RLData augmentation is known to provide substantial benefits for image-based reinforcement learning (RL) but the mechanism is not clear. We show that data augmentation increases both the equivariance and invariance of the convolutional encoder, e.g. the feature map is spatially smooth. We show that a simple Gaussian blur operation can achieve the same effect for some of the tested environments.
-Equivariant-Reinforcement-Learning.png)


